Advertisement
)

AT A GLANCE
- Concept: Combinatorial Routing: Software continuously recalculates the exact path of hundreds of independent robots to prevent collisions.
- Concept: Kinematic Density: Removing human aisles allows engineers to compress physical storage racks tightly together.
- Concept: Throughput Velocity: High-speed elevators and shuttles extract exact inventory sequences in milliseconds.
- Concept: Software Ceiling: Computational power dictates warehouse capacity entirely, eliminating reliance on physical square footage.
HOW IT WORKS
Traditional warehouses operate like massive static libraries. Human workers push carts down wide concrete aisles to retrieve individual items stored on standard steel shelves. This legacy architecture wastes billions of cubic feet of physical space simply to accommodate human walking paths and forklift turn radiuses.
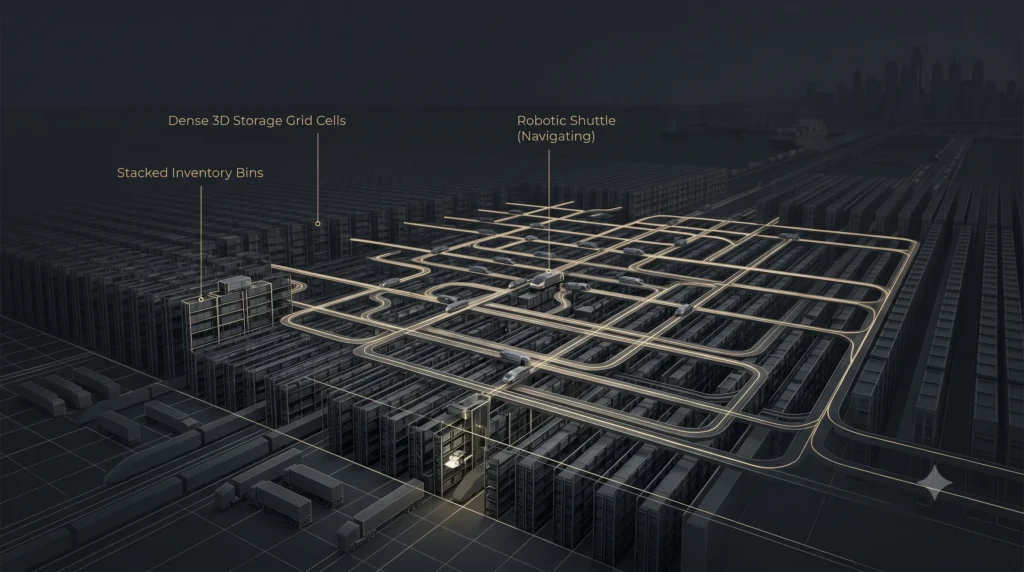
An Automated Storage and Retrieval System (ASRS) eliminates this volumetric void. By extracting human workers from the storage equation entirely, structural engineers compress the physical inventory into an ultra-dense, three-dimensional cubic lattice. Standardized plastic bins stack directly on top of each other, separated only by narrow vertical shafts and horizontal metal tracks.
The hardware consists of hundreds of autonomous shuttles that glide across the top of this aluminum grid at speeds exceeding ten miles per hour. When an order arrives, a specific shuttle drives to the precise horizontal coordinate, drops a mechanical hoist, grabs the target bin, and races to an automated elevator to deliver the product to a stationary packing station.
When a requested item sits at the bottom of a stack, the system executes a rapid digging maneuver. Shuttles coordinate dynamically to excavate the top bins, depositing them in nearby temporary slots to expose the target inventory. The software tracks every displaced bin to continuously optimize the arrangement of high-demand items near the top surface.
The central engineering challenge is not the mechanical lifting, but the combinatorial mathematics. Managing a swarm of five hundred high-speed robots on a single structural plane creates an immediate risk of catastrophic collision gridlock. The central routing brain must calculate the kinematic trajectory of every single shuttle simultaneously.
To prevent bottlenecks, the software engine assigns non-overlapping temporal and spatial reservations to each robot. The system recalculates thousands of potential routes every millisecond, predicting where every shuttle will physically exist ten seconds into the future. This predictive computation guarantees that high-priority inventory moves without mechanical interruption.
WHY IT MATTERS NOW
Global supply chain velocity dictates corporate survival. Modern consumer expectations require retailers to deliver millions of completely distinct product combinations within twenty-four hours. This intense logistical pressure shatters the physical capabilities of human-powered, manual fulfillment centers.
E-commerce giants and grocery chains face severe labor shortages and skyrocketing industrial real estate costs near major urban population centers. Autonomous robotic platforms solve both economic constraints simultaneously. Companies like Symbotic and AutoStore build systems that compress a one-million-square-foot traditional warehouse into a fraction of that size, allowing retailers to place micro-fulfillment centers directly inside city limits.
This spatial compression drives massive corporate capital expenditures. Walmart recently committed billions of dollars to retrofit its national distribution network with autonomous robotic grids. This investment proves that the physical storage of goods has transitioned from a real estate strategy into a high-frequency computational strategy.
When a retailer commands this level of intralogistics optimization, they sequence truck loading perfectly. The algorithmic engine extracts heavy items first to build the structural base of a shipping pallet, followed by fragile items on top. This sequential precision eliminates product damage and maximizes the volumetric efficiency of every departing semi-truck.
WHAT MOST PEOPLE MISS
Logistics commentators routinely credit fast shipping to the sheer physical size of megawarehouses. They assume that holding more inventory under a single massive roof automatically generates faster customer delivery times.
They miss the absolute computational ceiling governing modern fulfillment. If a retail giant doubles the number of robots in a grid to increase speed, the mathematical complexity of pathfinding scales factorially, commonly expressed in computer science as O(n!). Adding more hardware without scaling the routing logic simply causes the swarm to freeze in a permanent state of collision avoidance.
Observers also ignore the physical friction of continuous acceleration. Every micro-stop a robot makes to avoid a routing conflict drains internal battery life. Optimal routing software functions directly as an energy conservation tool, keeping the shuttles moving smoothly and preventing premature mechanical wear. The speed limit of global logistics relies entirely on code, not steel.
THE TRAJECTORY
Next 12–36 Months: Retailers will deploy autonomous robotic picking arms at the edge of the physical grid. These arms will utilize stereoscopic computer vision to replace the final human task of moving individual items from the storage bin into the outbound shipping box.
Next Five Years: Multi-temperature robotic grids will dominate grocery logistics. Highly specialized shuttles will physically cross thermal boundaries, combining frozen goods and fresh produce into a single customer order without human intervention.
Next Ten Years: Competing distribution facilities will network their routing algorithms regionally. Predictive artificial intelligence will physically pre-position high-demand inventory closer to the loading docks hours before regional consumers actually execute a digital purchase.
What Could Go Wrong: A targeted cyberattack or severe software glitch within the central swarm coordinator could instruct hundreds of high-speed shuttles to occupy the same physical coordinates simultaneously. The resulting kinetic collisions would physically destroy the aluminum grid and halt billions of dollars of national commerce.
Most Likely Outcome: The dense cubic architecture will become the mandatory standard for all tier-one distribution networks. The market will consolidate around a few dominant software providers who possess the mathematical algorithms capable of managing extreme robotic density without inducing physical gridlock.
KEY TERMS
- Intralogistics: The art and science of managing the physical flow of information and material goods within the boundaries of a single distribution facility.
- Combinatorial Optimization: A branch of applied mathematics used to find the most efficient routing paths among thousands of moving variables to prevent physical bottlenecks.
- Kinematics: The physical study of the motion of mechanical points and bodies without considering the mass or the forces that cause the motion.
- Micro-Fulfillment Center: A highly compressed, automated storage facility placed within dense urban centers to accelerate last-mile customer delivery.
- Swarm Robotics: The coordination of large numbers of relatively simple physical robots using decentralized software to execute complex logistical tasks.
SOURCES
- Massachusetts Institute of Technology (MIT) Center for Transportation and Logistics — Algorithmic Routing in High-Density Automated Storage Systems
- Symbotic Inc. — System Architecture and Autonomous Swarm Robotics Specification
- AutoStore System — Grid Infrastructure and High-Frequency Bin Sequencing Parameters
- IEEE Robotics and Automation Letters — Collision-Free Trajectory Planning for Multi-Agent Warehouse Networks